Drone Pervanesi (Quadcopter Propeller)

Tanım
Quadcopterde bulunan dört motorun amacı, takılan dört pervaneyi döndürerek itme kuvveti sağlamaktır. Motorlara verilen hıza göre pervanelerin hızları arttıkça quadcopteri yükseltir veya alçalma hareketi yapar. İki pervane saat yönüne, diğer iki pervane saat yönünün tersine dönmektedir.
Pervane seçiminde iki standart vardır;
- Pitch: uzun seçilirse daha uzak mesafede kesim yapar ve titreşimi fazla olur. Quadcopter üzerinde video çekimi için az pitch değerine sahip pervane kullanılır. Yarışma için büyük pitch değerleri seçilebilir. Şekil 2.7’de yüksek ve düşük pitch değerine sahip olan pervanelerin karşılaştırılması verilmiştir.
- Çap: motorun gücü ve kaldırılacak olan ağırlığa göre pervane çap seçimi yapılır.
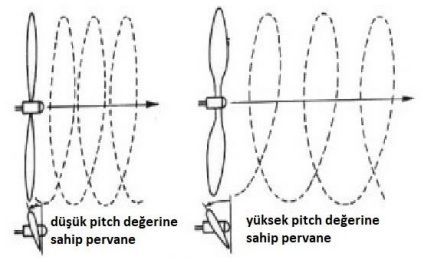
Şekil 2.7. Yüksek ve düşük pitch değerine sahip parvene.
8060 pervanesi ayrıntılı olarak verirsek ilk 80 değeri 8.0 inç çapa sahip olduğunu gösterir ve 60 değeri pitch değerine sahip olduğu anlamına gelir.

Quadcopterin temel hareketleri bu bölümde yer almıştır. Motorlara takılan pervanelerin iki farklı dönüş yönü vardır. Üzerinde bulunan dört adet motorun çapraz şekilde bağlanmıştır.
Quadcopterde bulunan dört motorun amacı, takılan dört pervaneyi döndürerek itme kuvveti sağlamaktır. İki pervane saat yönüne, diğer iki pervane saat yönünün tersine dönmektedir.