Drone Hareketleri (Quadcopter Movements)

Tanım
Quadcopterin temel hareketleri bu bölümde yer almıştır. Motorlara takılan pervanelerin iki farklı dönüş yönü vardır. Quadcopter üzerinde bulunan dört adet motorun çapraz şekilde bağlanmıştır. İki motor saat yönüne diğer ikisi saat yönünün tersine hareket etmektedir. Quadcopterin yönünü ve konumu kontrol etmek için, dört motor üzerine verilen voltaj ile hızlarını ayarlayıp istenilen pozisyona ulaşmak mümkündür. Quadcopterin hareketleri 6 serbestlik derecesi ile sağlanır. Bu 6 serbestlik derecesi 12 durum ile ifade edilir. İlk altı durum euler açıları olan yalpa (roll), yunuslama (pitch), sapma (yaw) açıları ve açısal hızlar olan p, q ve r olmaktadır. Diğer altı durum x, y, z ve bunlardan oluşan, lineer hızlar olan u, v ve w’dur.
Şekil 3.2, 3.3, 3.4 ve 3.5’teki yer alan numaraları isimlendirirsek;
- 1 ve 3 motorlar sırayla, sağ ve sol motorlardır.
- 2 ve 4 motorlar sırayla, arka ve ön motorlardır.
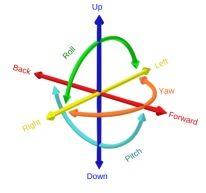
Şekil 3.1. 6 serbestlik derecesi.
Drone Hareketleri
1. Dikey Hareket
Quadcopter üzerinde bulunan bütün motorların hızının eşit olarak aynı anda arttırılması veya azaltılmasıyla gerçekleşir. Quadcopterin motorlarının itme kuvvetinin kendi ağırlığından fazla olduğu durumda dikey eksende yukarı yönlü hareket sağlar ya da kendi ağırlığından az itme kuvveti olursa dikey eksende alçalma hareketi yapar.
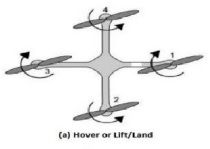
Şekil 3.2. Quadcopter havaya yükselme ya da alçalma hareketinin sağlanması.
2. Yalpa (Roll) Hareketi
Quadcopter üzerindeki yer alan ön ve arka motorların hızından dolayı kaynaklanan hız farkı, motorların kaldırma kuvveti farkı oluşur. Quadcopter ileri ya da geriye gitmeye çalışır. Bu harekete yalpa (roll) hareketi denir.
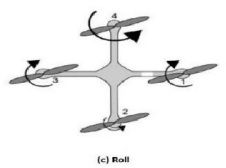
Şekil 3.3. Quadcopter yalpa hareketi.
3. Yunuslama (Pitch) Hareketi
Quadcopter üzerindeki yer alan sağ ve sol motorların hızından dolayı kaynaklanan hız farkından dolayı kaldırma kuvveti farkı oluşur. Quadcopter sağa ya da sola gitmeye çalışır. Bu harekete yunuslama (pitch) hareketi denir.
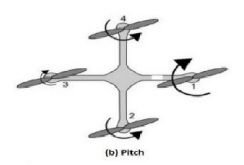
Şekil 3.4. Quadcopterin yunuslama hareketi.
4. Sapma (Yaw) Hareketi
Quadcopter üzerindeki yer alan saat yönünde dönen iki motorun ve diğer saat yönüne ters dönen iki motorun hızlarından oluşan farktan dolayı quadcopter kendi etrafında döner. Bu harekete sapma (yaw) hareketi denir.
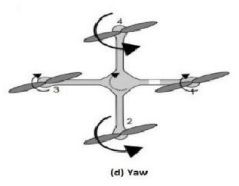
Şekil 3.5. Quadcopterin sapma hareketi.

Quadcopterin temel hareketleri bu bölümde yer almıştır. Motorlara takılan pervanelerin iki farklı dönüş yönü vardır. Üzerinde bulunan dört adet motorun çapraz şekilde bağlanmıştır.
Quadcopterde bulunan dört motorun amacı, takılan dört pervaneyi döndürerek itme kuvveti sağlamaktır. İki pervane saat yönüne, diğer iki pervane saat yönünün tersine dönmektedir.